Minimum Total Distance Traveled
Problem
There are some robots and factories on the X-axis.
You are given an integer array robot where is the position of the robot.
You are also given a 2D integer array where indicates that is the position of the factory and that the factory can repair at most robots.
The positions of each robot are unique. The positions of each factory are also unique. Note that a robot can be in the same position as a factory initially.
All the robots are initially broken; they keep moving in one direction.
The direction could be the negative or the positive direction of the X-axis.
When a robot reaches a factory that did not reach its limit, the factory repairs the robot, and it stops moving.
At any moment, you can set the initial direction of moving for some robot.
Your target is to minimize the total distance traveled by all the robots.
Return the minimum total distance traveled by all the robots.
The test cases are generated such that all the robots can be repaired.
Note that
- All robots move at the same speed
- If two robots move in the same direction, they will never collide
- If two robots move in opposite directions and they meet at some point, they do not collide. They cross each other
- If a robot passes by a factory that reached its limits, it crosses it as if it does not exist
- If the robot moved from a position x to a position y, the distance it moved is
Example
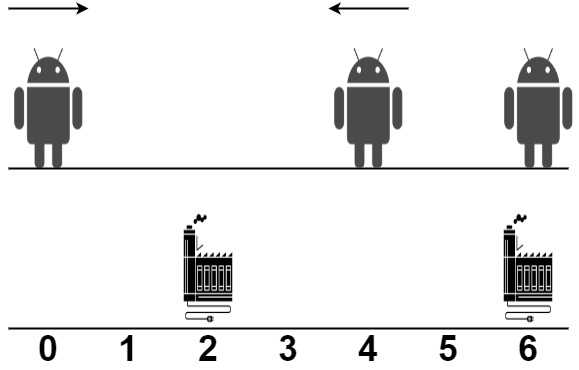
Input: robot = [0,4,6], factory = [[2,2],[6,2]]
Output: 4
Explanation: As shown in the figure:
- The first robot at position 0 moves in the positive direction. It will be repaired at the first factory.
- The second robot at position 4 moves in the negative direction. It will be repaired at the first factory.
- The third robot at position 6 will be repaired at the second factory. It does not need to move.
The limit of the first factory is 2, and it fixed 2 robots.
The limit of the second factory is 2, and it fixed 1 robot.
The total distance is |2 - 0| + |2 - 4| + |6 - 6| = 4. It can be shown that we cannot achieve a better total distance than 4.
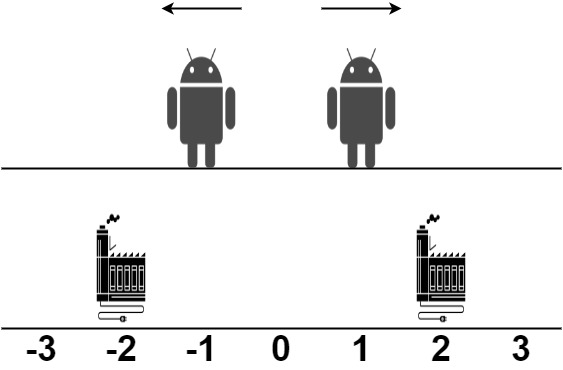
Input: robot = [1,-1], factory = [[-2,1],[2,1]]
Output: 2
Explanation: As shown in the figure:
- The first robot at position 1 moves in the positive direction. It will be repaired at the second factory.
- The second robot at position -1 moves in the negative direction. It will be repaired at the first factory.
The limit of the first factory is 1, and it fixed 1 robot.
The limit of the second factory is 1, and it fixed 1 robot.
The total distance is |2 - 1| + |(-2) - (-1)| = 2. It can be shown that we cannot achieve a better total distance than 2.
Constraints
Submit your solution at here
Solution
Intuition
Let is the minimum distance first robots have to travel to get repaired by first factories and the last robots goes to the factory.
Let is the minimum distance first robots have to travel to get repaired by first factories.
By that definition, .
The answer is where is the number of robot and is the number of factory.
Lets build the dynamic programming table calculate all
By definition:
- , we need to travel 0 distance to repair 0 robot
- , we can't repair any robot with 0 factory
Let is the total distance has to travel to
Lets say we need to calculate , we have
Complexity
- Time complexity:
- Space complexity: , can be optimized to if needed
Code
impl Solution {
pub fn minimum_total_distance(mut robot: Vec<i32>, mut factory: Vec<Vec<i32>>) -> i64 {
use std::cmp::min;
robot.sort();
factory.sort_by(|a,b| a[0].cmp(&b[0]));
let n = robot.len();
let m = factory.len();
let mut f = vec![vec![0;m+1];n+1];
for i in 1..=n {
f[i][0] = 200_000_000_000i64;
}
// f[i][j] = use j factories to repair i robots, what is the minimum cost
for i in 1..=n {
for j in 1..=m {
let factory_cap = factory[j-1][1];
let factory_pos = factory[j-1][0];
let to_repair = min(i, factory_cap as usize);
let mut cost = 0;
f[i][j] = f[i][j-1];
for k in 1..=to_repair {
cost += (robot[i-k] - factory_pos).abs() as i64;
f[i][j] = min(f[i][j], f[i-k][j-1]+cost);
}
}
}
// println!("robot: {robot:?}");
// println!("factory: {factory:?}");
// println!("f: {f:?}");
f[n][m]
}
}